自動運転の実現に向けての課題とは?さまざまな課題と解決策を紹介
更新日: 2025/11/3投稿日: 2025/8/27
EV-


-

-

-


自動車の自動運転が実現すれば、交通事故が年間約3,000人から大幅に減少し、公共交通機関の運転手不足の問題が解決するといった、さまざまなメリットがあると期待されています。
一方で、技術的な限界や法整備の遅れなど、実用化に向けた課題も山積。
本記事では、自動運転の実現・普及に向けての6つの主要課題と、2025年最新の解決策を、ITシステム・クラウドサービスの専門企業の視点から解説します。
自動運転とは?2025年時点の実用化レベルと現状

自動車の自動運転とは、人間に代わってシステムが他の自動車や歩行者、障害物などの検知や運転操作の判断を行い、自動車を操縦する技術です。
AI(人工知能)、各種センサー、高精度地図、5G通信などを統合した高度なシステムにより実現されます。自動運転にはレベル0からレベル5までの6段階です。
数字が大きくなるほど、システムの運転に対する介入度が高まります。現在の日本では、レベル2までの運転支援機能が市販車に広く普及している段階です。
自動運転レベルの定義と2025年時点の実用化状況
以下に自動運転のレベルをわかりやすくまとめました。
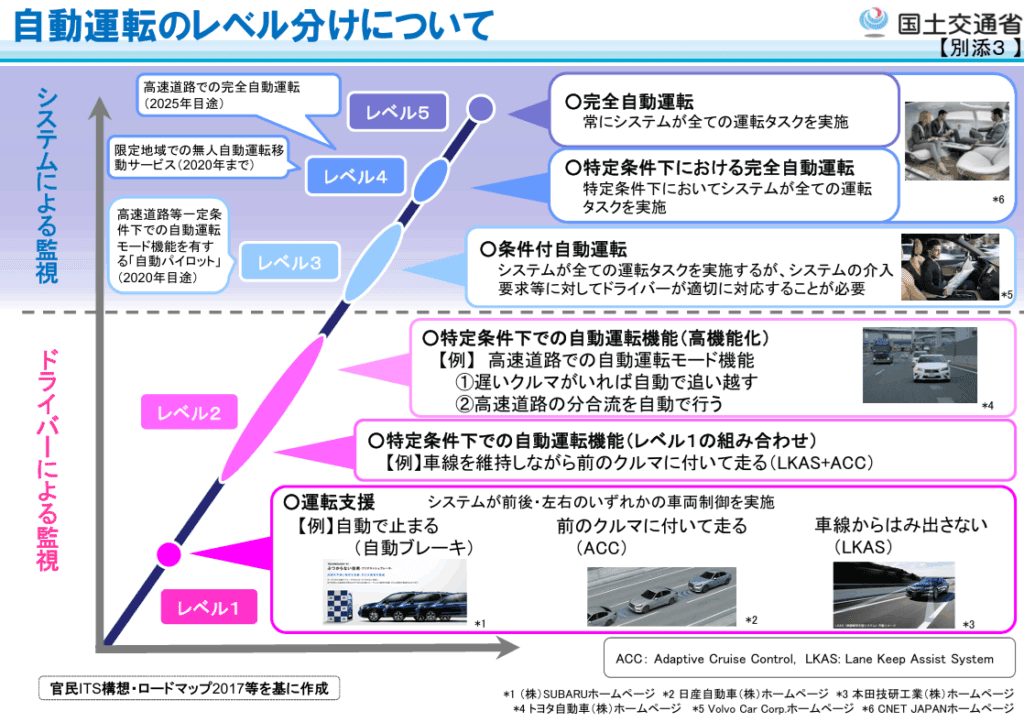
| レベル | 定義 | 運転主体 | 実用化状況(2025年8月現在) |
|---|---|---|---|
| レベル0 | 運転支援なし | 人間 | 従来の一般車両 |
| レベル1 | アクセル・ブレーキまたはハンドルのいずれか一方を支援 | 人間 | 衝突被害軽減ブレーキ搭載車など、広く普及 |
| レベル2 | アクセル・ブレーキとハンドルの両方を支援 | 人間 | 日産ProPILOT2.0、ホンダSENSING Elite、トヨタAdvanced Drive、スバルアイサイトXなど多数 |
| レベル3 | 特定条件下でシステムが全ての運転操作を実施(緊急時は人間が対応) | システム | 2021年にホンダ「レジェンド」が100台限定販売(現在は販売終了) |
| レベル4 | 特定条件下でシステムが全ての運転操作を実施(人間の介入不要) | システム | 日本では路線バス等で限定運用。福井県永平寺町で国内初サービス開始。米国・中国では無人タクシーが運行中 |
| レベル5 | あらゆる条件下でシステムが全ての運転操作を実施 | システム | 世界中で未実現(TURINGが2025年実現を目標に開発中) |
レベル1・2は「運転支援」であり、運転の主体はあくまで人間です。先行車の存在を検知できなかったために追突したといったケースでも、事故を起こした責任は運転者にあります。
障害物を検知したときに自動的にブレーキ操作を行う衝突被害軽減ブレーキや、先行車への追従走行を行う定速走行・車間距離制御装置(ACC)などが、レベル1~2に相当する機能です。
一方、レベル3以上は運転の主体がシステムになります。ただし、レベル3は自動運転が行える状況が渋滞中の高速道路などに限定されており、システムからの要求があれば運転手が運転操作に戻る必要があります。
レベル4以上が、人間の運転への介入を前提としない真の自動運転です。国土交通省は2025年を目途に国内40箇所、2030年までに100箇所以上で無人自動運転移動サービスの実現を目指しています。
2025年8月時点では、乗用車におけるレベル4の自動運転は実現していませんが、日本では路線バスや特定地域での移動サービス、米国や中国では無人運転タクシーとして、限定的にレベル4の自動運転が行われています。
なお、自動運転のレベルについての詳細は、以下の記事もご確認ください。
自動運転に期待される社会課題への効果

自動運転技術の実用化により、以下のような社会課題の解決が期待されています。
| 社会課題 | 現在の状況 | 自動運転による効果 |
|---|---|---|
| 交通事故の削減 | 年間死亡者数約3,000人 事故原因の96%はドライバーに起因 | ヒューマンエラーの削減により、死亡事故を大幅に減少 自動ブレーキ、安全な速度管理、車線維持機能の活用 |
| 渋滞の緩和 | 不適切な車間距離や加減速により渋滞が発生 経済活動への悪影響 | 適切な車間距離の維持と加減速管理により渋滞を抑止 時速60kmで走行中、1秒の遅延で約16.7m進むため、リアルタイム制御が重要 |
| 高齢化社会への対応 | 地方を中心に高齢者の移動手段が減少 トラックドライバーの不足が深刻化 | 高齢者の移動手段確保 物流ドライバーの負担軽減と生産性向上 高速道路での隊列走行による効率化 |
| 国際競争力の強化 | 日欧米で自動運転の開発競争が激化 日本の基幹産業である自動車産業の競争力確保が必要 | 日本主導で国際基準を策定 技術のパッケージ化による海外展開 |
※参考:国土交通省「自動運転を巡る動き」
完全な自動運転実現に向けての6つの主要課題【2025年最新版】

本格的な自動運転が実現して社会に広く普及するためには、技術的にも社会的にも、解決するべき課題が多数存在します。
国土交通省や経済産業省、民間企業が連携して取り組んでいる主要な課題を、6つのカテゴリーに分けて解説します。
課題1:技術的な限界|センサーとAI判断の精度向上が必要
完全な自動運転の実現のためには、現在のセンサーの検知性能や、AIの判断能力などの技術的な限界をクリアしていく必要があります。
自動運転を行う手法の根幹は、センサーで他車や歩行者、障害物などを検知して、AIによる判断で運転操作を行うことです。しかし、以下のような技術的課題が残されています。
センサーの検知性能の限界
- 悪天候時の認識精度低下:大雨、濃霧、吹雪などの気象条件下では、カメラやLiDAR(レーザーセンサー)の検知精度が著しく低下します
- 逆光や夜間の認識困難:強い日差しや夕日の逆光、街灯の少ない夜間では、画像認識の精度が落ちます
- 複雑な道路状況への対応:工事現場の仮設標識、消えかかった路面標示、突発的な障害物(落下物や動物の飛び出し)の検知が困難です
- レアケースのシナリオ対応:前方の車線が工事や荷物の積み下ろしで塞がっている場合など、頻繁には起こらないが対応が必要な状況への判断が課題です
AIの判断能力の課題と倫理的問題
AIの判断能力は進歩し続けていますが、それでも予期できない事象や珍しい事象において、適切な判断ができるのかという不安が残るのが現状です。
人間の運転手ならば行わないような判断をして、逆に被害を拡大させる可能性も否定できません。特に問題となるのが、いわゆる「トロッコ問題」と呼ばれる倫理的ジレンマです。
乗員や周辺の通行人の負傷がどうしても避けられないような緊急時に、誰を助けることを優先する判断をAIに行わせるのかという問題が、技術面だけでなく社会的合意形成の観点からも課題となっています。
日本特有の環境的課題
日本における自動運転の課題として、日本の道路は狭い道や歩行者の通行が多い道などが多く、自動運転が特に難しい環境となっていることがあげられます。
- 狭隘な生活道路:住宅街の狭い道路では、対向車とのすれ違いや歩行者との距離感の判断が高度に要求されます
- 複雑な交差点:五差路や変形交差点など、見通しの悪い複雑な道路形状が多く存在します
- 左側通行:日本は世界的に少数派の左側通行の国なので、右側通行の国での技術開発の成果をそのままでは活用できません
- 実証実験フィールドの不足:自動運転の実証実験を行うフィールドが少ないことも、日本で普及が進まない原因の1つです
課題2:システムダウンやサイバー攻撃のリスク|セキュリティ対策が不可欠
完全な自動運転を行うシステムは、技術的に相当高度で複雑なシステムになると考えられます。運転システムがトラブルを起こしてダウンしてしまったときに、自動車を安全に制御できるのかが重要な課題です。
システム障害時の安全確保
自動運転が普及した社会では、自動車の通行をコントロールする管制システムの導入が想定されます。管制システムがダウンすると、発生するリスクは以下のとおりです。
- 複数の自動運転車が同時に制御不能になる可能性
- 交通網全体が麻痺し、大規模な社会的混乱を招く恐れ
- 緊急車両の通行が妨げられる二次災害のリスク
サイバー攻撃への脆弱性と対策の必要性
自動運転車はネットワークに接続して、管制システムとの通信や周辺車両との情報共有(V2X通信)を行うことが前提です。
ネットワークを通じてサイバー攻撃を受けた自動車が、危険な運転を行ったり、盗難されたりする可能性が否定できません。
実際に海外では、「停止」の道路標識を「時速60km制限」と誤認させる悪質なサイバー攻撃が確認されています。
こうした攻撃により、第三者によって故意に事故を引き起こされる懸念や、ハッキングによる車両の盗難、盗難された車両による事故といったリスクが存在します。
| 脅威の種類 | 想定されるリスク | 対策の方向性 |
|---|---|---|
| 不正アクセス | 車両制御システムの乗っ取り、走行データの改ざん | 多層防御、暗号化通信、侵入検知システム |
| マルウェア感染 | システムの誤動作、センサーデータの改変 | ソフトウェアの定期更新、ホワイトリスト方式 |
| DoS攻撃 | 通信遮断による制御不能、管制システムのダウン | 冗長化、オフライン時の安全制御モード |
| なりすまし | 偽の交通情報による誤誘導、衝突の誘発 | デジタル証明書、認証基盤の強化 |
課題3:インフラ整備の必要性|高精度地図と通信環境の構築が課題
自動運転が普及した社会の実現には、手動運転の時代には必要がなかったインフラを整備する必要があります。
高精度3次元地図の整備と更新
自動車に搭載されたセンサーやカメラによる検知だけでは、完全な自動運転は困難です。例えば、以下のような状況では、リアルタイムのセンサー情報だけでは不十分です。
- 道路上の白線が消えかかっていて車線の検知が困難
- 木が生い茂っていて標識が隠されている
- トンネル内など衛星測位(GPS)の精度が低下する場所
- 交差点での死角など、センサーの精度が落ちる状況
そのため、自動車が走行する道路に関する高精度の地図(3次元地図)をあらかじめ持っておく必要があります。しかし、高精度地図の作成と維持管理には以下の課題があります。
- 作成コストの膨大さ:全国の道路を対象とした地図作成には莫大な投資が必要
- 更新の頻度:道路工事や新設道路への対応で、常に最新状態に保つ必要がある
- 地域格差:都市部と地方部で整備状況に大きな差が生じる懸念
- 標高データの重要性:橋や勾配、山間部のトンネル等を正確にシミュレーションするには、標高データを含む高精度地図が不可欠
通信インフラとデータセンターの整備
自動車と地上の間で情報を送受信するための通信インフラやデータセンターの整備も必要です。
交差点にセンサーを設置し、自動車のセンサーと連動させることで、人間では把握することが困難な視界領域の情報を入手できれば、事故を防げる可能性が高まります。
このような技術の実現には、情報インフラの整備に加え、5Gに留まらないさらに高速で安定した通信技術も必要になると考えられます。特に必要な要件を以下にまとめました。
| 要件 | 目標水準 | 現状の課題 |
|---|---|---|
| 通信速度 | 10Gbps以上(5G/Beyond 5G) | 地方部での5G基地局の整備遅れ |
| 低遅延 | 1ミリ秒以下 | クラウド経由では遅延が発生。衝突回避や自動ブレーキが必要な場面では、ミリ秒単位の遅延が命取りになる可能性 |
| 接続安定性 | 99.999%以上の可用性 | トンネルや山間部での通信断 |
| カバレッジ | 全国の主要道路 | 過疎地域での投資対効果の問題 |
これらのインフラ整備には、国・自治体・通信事業者・自動車メーカーの連携が不可欠です。
課題4:データ通信量が多すぎる|処理遅延が致命的リスクに
自動運転に関する状況判断などのタスクは、自動車に搭載されたハードウェアだけで処理するには重すぎるケースも想定されます。
そこで、クラウドにデータを送信し、処理結果を自動車に返送する方式が検討されていますが、データ通信量が莫大になることが課題です。
自動運転車が生成するデータ量
1台の自動運転車が走行中に生成するデータ量は、1日あたり約4TB(テラバイト)と試算されています。これは以下のような膨大なデータから構成されます。
- カメラ映像(複数のカメラから高解像度で撮影)
- LiDARの点群データ(周辺環境の3次元スキャン)
- レーダーの反射波データ
- GPSや各種センサーの測定値
クラウドAI方式では、処理の重いタスクをクラウドに送信して処理を行い、車側で結果を受信。
しかし、膨大な情報量を通信するためには莫大な通信量が必要になり、クラウドにデータをアップする場合、結果の受信までにミリ秒単位の遅延も懸念されます。
処理遅延の危険性
処理を行う過程で遅延が発生すると考えられます。仮に危険な状況に陥った時の判断が数秒単位で遅延するようでは、判断の遅れが致命的な事態を招いてしまうため慎重に進める必要があるのです。
時速60kmで走行中の自動車は、1秒間に約16.7m進みます。わずか2秒の遅延でも33m以上進んでしまうため、緊急回避が間に合わない可能性があります。
課題5:法整備の必要性|責任の所在と国際基準の統一が課題
自動車の運転に関する法律は、人間が運転することが前提だった時代に定められたものなので、自動運転の実現を見据えた法改正が必要です。
現行法の問題点
例えば自動車運転処罰法の第5条には「自動車の運転上必要な注意を怠り、よって人を死傷させた者は、七年以下の拘禁刑又は百万円以下の罰金に処する。」と書かれており、人間の運転手の存在が前提となっています。
また「自動車の運転上必要な注意」の定義は具体的ではなく、法律の条文とAIの判断基準とを、どのように整合させるのかも課題です。(参考:e-GOV法令検索)
事故時の責任の所在
自動運転車が事故を起こした場合の事故の責任を誰が負うことになるのかも重要な課題となっており、官民で議論が進められています。
| 責任の種類 | 想定される責任主体 | 検討状況 |
|---|---|---|
| 刑事責任 | レベル4以上では基本的に乗員は責任を負わない方向 | 道路交通法改正により整備中 |
| 民事責任(損害賠償) | 従来通り、自動車の所有者や運送事業者などがまず責任を持つ その上で、保険会社が自動車メーカーと協力して原因追求や協議を行う | 国土交通省の研究会で方針策定済み 被害者の迅速な救済を優先 |
| 製造物責任 | 自動運転システムの不備が原因の場合、最終的な賠償金の支払者は製造者(自動車メーカー、システム開発会社、AIベンダーなど) | 責任分担の詳細を協議中 |
国際的なルール作りの必要性
自動運転が本格的に普及した社会では、さまざまな国で開発されたシステムを搭載した自動運転車が、国境を越えて走行することになるので、国際的なルールの制定も不可欠です。
自動車に関連する国際的な条約として「ジュネーブ道路交通条約」があります。
条約の第8条には「車両にはそれぞれ運転者がいなければならない」「運転者は、常に、車両を適正に操縦しなければならない」などと記されています。
自動運転に関する国際的なルール作りのためには、条約の改正または新たな条約が必要になることは明らかです。
日本は国連の自動車基準調和世界フォーラム(WP29)で共同議長を務めるなど、国際標準化において主導的な役割を果たしています。(参考:外務省 道路交通に関する条約)
課題6:自動運転の社会的受容性の醸成|信頼構築が普及の鍵
技術的・制度的な課題がクリアされても、自動運転が社会に受け入れられるように信頼を構築していく必要があります。
一般市民の心理的障壁
現在でも「自動運転は怖い」というイメージを持つ人は少なくありません。自動運転が怖いと思われる主な理由は以下のとおりです。
- 判断プロセスの不透明性:自動運転車がどのような判断を行って運転をしているのかが、歩行者や他の車の運転手からわかりづらい
- 制御を手放す不安:運転という行為を機械に完全に委ねることへの心理的抵抗
- 事故報道の影響:自動運転特有の事故が大きく報じられることで、ネガティブな印象が形成される
GMクルーズの事故事例から学ぶ教訓
特に「自動運転だから起きた」という事故は、社会的受容を大きく後退させます。
2023年10月、米国でGMクルーズが運行していた無人運転タクシーが、別の自動車が起こした事故の被害者を、自車で約6m引きずるという事故が発生しました。
この無人運転タクシーは、直ちに停車せずに路肩に寄せてから停車するという、人間ならばまず行わないような判断をして事故の被害を拡大させたのです。
この事故をきっかけに、GMクルーズはカリフォルニア州での運行許可を一時停止され、最終的には自動運転タクシー事業から撤退することになりました。
一方、競合他社のWaymoは、2024年にサンフランシスコ、ロサンゼルス、フェニックスでサービスエリアを拡大し、週間有料乗車数を大幅に増加させるなど、着実に実績を積み上げています。(参考:Forbes JAPAN)
社会的受容性を高めるための施策
自動運転を社会に浸透させるためには、以下のような取り組みが重要です。
- 技術の情報公開:自動運転のアルゴリズムや安全対策について、わかりやすく説明する
- 実証実験の公開:一般市民が実際に体験できる機会を増やし、理解を深める
- 安全記録の開示:自動運転の事故率を手動運転と比較可能な形で公表する
- 段階的な導入:限定地域や特定用途(バス、物流など)から始めて、実績を積み上げる
自動運転を実現・普及させるためには、GMクルーズのタクシーが起こしたような事故が発生する可能性を、極限まで低下させる必要があるでしょう。
自動運転の課題解決に向けた取り組みと最新技術【2025年版】

前章で挙げた課題に対して、国内外の自動車メーカー、IT企業、研究機関が連携して解決策の開発を進めていますここでは、2025年時点で実用化が進んでいる主要な技術と取り組みを紹介します。
解決策1:自動運転を行うAIの判断力向上|深層学習と生成AIの活用
自動運転の判断を行うAIの判断力を向上させるために、技術開発が加速しています。詳しく見ていきましょう。
機械学習と深層学習による精度向上
AIは判断力を「学習」によって向上させられます。主な学習手法は以下のとおりです。
| 学習手法 | 特徴 | 自動運転での活用例 |
|---|---|---|
| 機械学習 | 人間が物体の特徴を入力して区別させる | 歩行者・車両・標識の識別 |
| 深層学習(ディープラーニング) | AIが自ら特徴を見つけ出して推論により区別 | 複雑な交通状況の理解、予測困難な動きへの対応 |
| 強化学習 | 試行錯誤を通じて最適な行動を学習 | 効率的な経路選択、運転戦略の最適化 |
深層学習は、これまで人間が持っていなかった判断基準の発見にもつながるとして、期待が高まっています。
例えば、人間が気づかない微細な路面状態の変化から、スリップのリスクを予測することなどが可能になりつつあります。
生成AIによるシミュレーション高度化
珍しい事象やレアケースにおいてもAIが判断をできるようにするために、シミュレーションを充実させるという手法が重要視されています。
特に近年の技術の進歩が著しい生成AIを活用すれば、シミュレーションを行う状況を数多く生み出して、自動運転のAIの訓練を行うことが可能です。
- 仮想環境の自動生成:天候、時間帯、交通量などのパターンを無数に作り出せる
- エッジケースの学習:現実では滅多に起きない危険なシナリオも安全に訓練できる
- コスト削減:実車での走行試験を減らし、開発期間を短縮できる
解決策2:サイバー攻撃に対するセキュリティの向上|全新車への対策義務化
自動車へのサイバー攻撃を防ぐために、制度面・技術面の両方で対策が進められています。
サイバーセキュリティ基準の義務化(2026年5月から全新車に適用)
国土交通省は、サイバーセキュリティとソフトウェアのアップデート基準が適用される自動車の範囲を順次拡大しています。2026年5月1日までには、国内の全ての新車に適用されることになりました。
また、2022年7月1日からは、自動運転車サイバーセキュリティ対策に関する法規則の適用が決定しました。これにより、全ての新車は以下の要件を満たすことが必須になります。(参考:国土交通省)
- サイバー攻撃への防御機能の搭載
- 不正アクセスの検知・記録システム
- 安全なソフトウェアアップデート機能
- 脆弱性への迅速な対応体制
AI技術を活用した防御システム
2021年には、クリエイターズネクスト(本社:東京都港区)という企業が、AIの特許技術「ハイパーパラメーター最適化」を活用して、自動運転車のセキュリティー防御技術における世界一を達成しました。
この技術では、以下のようなAIの特性を活かしています。
- 未知の攻撃パターンの検知
- リアルタイムでの異常検知と遮断
- 攻撃手法の学習と進化する防御
今後は、サイバー防御に特化した回路の開発を行い自動車メーカーに販売するとともに、最新のサイバー攻撃に対応するためのプラットフォームを、サブスクリプションで提供することも視野に入れているようです。
今後、よりよいAIが開発され、サイバー攻撃への対策が強化されていくと期待されます。(参考:PR TIMES)
解決策3:データ通信量が多すぎて処理が遅延する課題の解決|エッジコンピューティングの導入
自動運転に必要なデータ通信や処理にかかる時間を短縮するために、エッジコンピューティングという手法が実用化段階に入っています。
エッジコンピューティングとは
エッジコンピューティングとは、自動車からデータを送るときに、近くに設置されているエッジサーバーに送って、データの処理や分析を行う方法です。
加工したデータのみをクラウドに送ることで、以下のメリットが得られます。
| メリット | 効果 | 自動運転での活用 |
|---|---|---|
| 低遅延 | クラウドまでの往復時間を削減(数ミリ秒→1ミリ秒以下) | 緊急回避判断の高速化。衝突回避や自動ブレーキが必要となる場面で、ミリ秒単位の遅延を最小化 |
| 通信量削減 | 生データを送らず、処理済みデータのみ送信 | ネットワークの負荷軽減 |
| 可用性向上 | クラウド障害時も最低限の機能は維持 | 通信断時の安全な自律走行 |
| プライバシー保護 | 生の映像データを外部に送らない | 乗員や歩行者のプライバシー確保 |
車両の近くでデータ処理や分析を行うエッジサーバーを設置することで、遅延を少なくし、データ処理を高速化します。(参考:NECソリューションイノベータ)
5G/Beyond 5Gとの組み合わせ
エッジコンピューティングの効果を最大化するために、5G通信やその次世代技術(Beyond 5G/6G)との組み合わせが進められています。これにより、以下の性能が実現可能です。
- 通信速度:最大10Gbps以上
- 遅延時間:1ミリ秒以下
- 同時接続数:1平方キロメートルあたり100万デバイス
解決策4:高精度3次元地図の整備|標高データによるさらなる高精度化
自動運転の本格的な実現に向けて、シミュレーションの精度も重要になってきます。
実車での試験や、システム上で平坦な道を走らせるシミュレーションというのが標準的でしたが、以下のようなさまざまなシナリオでのシミュレーションも重要です。
- 「事故多発地帯を抽出・再現して検証」
- 「勾配が原因となる高速道路の渋滞を検証」
そういった状況で、MATLAB®という自動運転などの制御分析のシミュレーションを行うシステムに、ゼンリン地図をAPIで組み込めるようになり、シミュレーション環境の構築に役立てられるようになりました。
ゼンリン地図APIは「標高データ」を持っているため、これまで再現できなかった橋や勾配、山間部のトンネル等の再現が可能となります。
精密且つ幅広い道路情報を得ることができるため、正確なシミュレーションに活かせるのです。
解決策5:法整備|段階的な規制緩和と責任の明確化
日本においても、自動運転に関する法整備は徐々に進められています。
レベル4の自動運転解禁(2023年4月)
2023年4月より、道路交通法においてレベル4の自動運転が解禁となりました。2022年4月には、レベル4の自動運転車に対し、公道での走行を許可する改正案が成立。
ただし、当面は以下の条件での運用が想定されています。
- 対象車両:バス、タクシー、物流車両などの商用車が中心
- 走行エリア:限定された地域(特定自動運行区域)
- 運行管理:遠隔監視・操作が可能な体制の整備が必須
一般消費者がレベル4の自動運転車を所有するのは、もう少し先になると推定されています。乗用車におけるレベル4の実現は、2025年を目途に高速道路での走行から段階的に進められる見込みです。
事故時の責任に関する方針
事故が起きた際の責任については、国土交通省の研究会で以下の方針が示されています。
- 刑事責任:レベル4の自動運転では人間の運転操作を前提としていないため、自動車の乗員が事故に関する刑事的な責任を負うことは基本的になくなるでしょう。
- 民事責任(損害賠償):従来同様、自動車の所有者・運行者が賠償責任を負う方向で検討されています。これは、事故の被害者が迅速に救済されるためです。
その上で、自動運転システムの不備といった製造者の過失があれば、最終的な賠償金の支払者は、製造者(自動車メーカーやシステム開発会社)になる仕組みが検討されています。
保険会社が自動車メーカーと協力して原因の追求や協議を行えるようにする体制も整備されています。(参考:国土交通省)
国際標準化における日本の貢献
自動運転に関する法整備は各国で進められており、国際的な取り決めもあり、日本が行った提案が国際標準となったケースも複数あります。
- 自動車線維持システムの国際基準(日本提案が採択)
- サイバーセキュリティとソフトウェアアップデートの基準(日本が主導)
- 自動運転の安全性評価枠組み(日本提案が国際標準化)
日本は今後も、国連の自動車基準調和世界フォーラム(WP29)において議論をリードしていく方針です。
自動運転の実現はいつから?2030年に向けたロードマップ
現在の日本では、以下のようなスケジュールで自動運転の実用化を目指しています。
| 時期 | 目標 | 詳細 |
|---|---|---|
| 2020年代前半 | 高速道路におけるレベル3の実現 | 一定の条件の下であれば運転操作を自動化して走行可能 |
| 2025年前後 | 高速道路におけるレベル4の実現 無人自動運転移動サービスを40箇所で開始 | 一定条件のもと、すべての運転操作を高度に自動化 技術開発、環境整備、社会受容性の課題解決に資するノウハウ・成果を生み出す |
| 2030年 | 完全自動運転普及に向けた環境整備 無人自動運転移動サービスを100箇所以上に拡大 | 日本や欧州、米国などで自動運転が成立するための環境を整える 事業化に向けたコストダウンを図り、本格的な普及を目指す |
※参考:国土交通省「自動運転を巡る動き」
【まとめ】自動運転の実現に向けて|課題は多いが2030年に向けて解決策も進展中

自動運転の実現のためには、技術的な課題や社会的な課題が山積です。しかし、課題の解決に向けた取り組みを官民が連携して重ねているのもまた事実。
2025年を目途に国内40箇所で無人自動運転移動サービスが開始される予定であり、2030年までには100箇所以上への拡大、そして完全自動運転普及に向けた環境整備が目標とされています。
今後も当メディアでは、自動運転やEVなどのモビリティ、ITシステム・クラウド技術に関する最新情報を発信していきます。最新情報が気になる場合は、ぜひ定期的にチェックしてみてください。
関連コラム

EV
中国の自動運転の現状は?実証実験や実例、事故など気になるポイントを解説

EV
自動運転レベル4とは?普及や仕組み、活用事例について解説

EV
電気自動車(EV)の充電時間の目安は?充電の種類や時間短縮の方法も解説

EV
カーボンニュートラルへの取り組み事例全15選!個人でできる取り組みも合わせて紹介

EV
自動運転機能付き軽自動車のおすすめは?現状と共に解説

EV


